北京时间4日23:30,埃塞俄比亚当地时间18:30,埃塞俄比亚民航局作为埃塞航ET302航班事故调查小组的主导者,公布了事故初步调查报告(preliminary report),我们第一时间为大家带来解读。
为了方便大家更好地理解文章内容,我们先介绍几个背景知识。
背景知识1
什么是水平安定面、升降舵
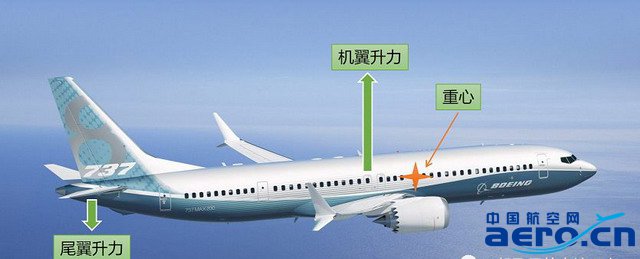
以飞机重心为受力点,飞机通过调节水平尾翼(包括水平安定面和升降舵)的升力大小来控制飞机俯仰(抬头/低头)——玩过跷跷板的可以脑补一下。
水平尾翼中,前面面积较大的叫做水平安定面(HorizontalStabilizer),后面面积稍小的叫做升降舵(elevator)。
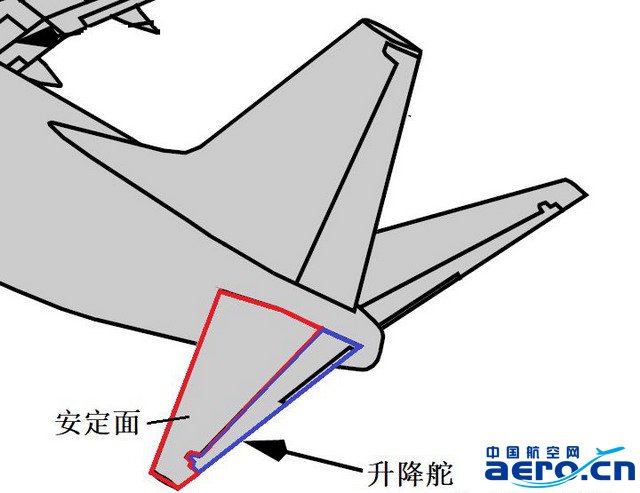
水平安定面面积比升降舵更大,俯仰控制效能更高,同样的俯仰改变效果所需要调整的角度比升降舵更小,使用配平驱动的控制方式,以达到更精准的控制效果。
B737NG/MAX飞机的水平安定面的移动范围是——
从“中立位”开始,
向上 4.2° 水平安定面“前缘上止位”(飞机低头配平-AND);
向下12.9°水平安定面“前缘下止位”(飞机抬头配平-ANU)。
下图左侧的三个 “-” 标记从上到下分别代表着“前缘上止位、中立位、前缘下止位”

下图是B737的安定面配平刻度表。
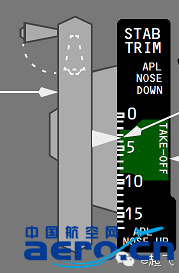
而安定面位置和安定面配平的对应关系是:

背景知识2
B737俯仰控制
对于737(CL/NG/MAX)飞机,飞行员通过前后移动驾驶杆,控制飞机的升降舵的角度。飞机自动驾驶和飞行员人工通过电动或者人工配平安定面,控制水平安定面的角度。安定面配平可以电动控制(自动驾驶和人工电动配平),也可以人工控制(手摇配平轮)。
B737的安定面配平一共有三种模式:
自动驾驶电动配平;
人工电动配平——通过驾驶杆上的配平电门;
人工手动配平——通过转动配平轮进行配平。
当安定面配平开关切断后,只能通过最后的人工手动配平模式,通过转动配平轮进行配平。

737NG驾驶舱,操纵系统原理与737MAX一致
水平安定面的作用是:
1、当飞行员/自动驾驶需要在杆(升降舵)上持续地施加一个力量(不论推杆还是拉杆)才能获得希望的俯仰状态时,可以人工调整、或者由飞机系统自动调整安定面的角度,帮助减小俯仰操纵的力量需求——飞得更轻松。
2、当飞机处于危险的大迎角状态时(接近失速),飞机也可以自动调整安定面的角度,帮助减小迎角,避免失速——避免失速危险。
”失速“概念参见前文《波音B737发现“未被告知的新BUG”?》
这就是安定面的安定(stabilize)作用。我们现在可以理解,这个部件之所以称之为安定面Stabilizer,是因为这个部件的作用就是用来起stabilize(安定、稳定)的作用,提高飞机俯仰方向(抬头/低头)的安定/稳定性(stability)。

——报告正文——
编者注:内容根据报告原文翻译,编排稍有调整(报告原文有个别处时间轴未按时间顺序),文末可下载事故初步调查报告原文。
报告正文-事件经过
注:
1、以下经过是基于DFDR(飞行数据记录器)、CVR(驾驶舱语音记录器)和ATC(空中交通管制)通话的初步分析。随着调查的继续,可能会在最终报告发布之前进行修订和更改。
2、时间均为世界协调时UTC,当地时间为UTC+3,北京时间为UTC+8。
05:37:34,ATC给ET-302航班发布起飞许可,并指挥其起飞后联系119.7 MHz。
大约05:38,飞机从07R跑道开始起飞滑跑,机场标高2333.5米,飞机襟翼设置为5(e起飞注:原文为5°,此处修改),安定面配平设置为5.6个单位。起飞滑跑表现正常,左右迎角(AOA)数值正常。起飞推力稳定在约94%N1,与N1基准值相匹配。随后的绝大部分时间里,N1基准值保持在94%左右,并且油门没有移动。N1基准值在记录结束前220秒指示消失。根据DFDR记录的控制杆力和CVR记录,机长是操纵飞机的飞行员。
05:38:43,飞机到达无线电高度大约50英尺,飞行指引仪横滚模式改为LNAV。(e起飞注:这意味着飞机在开始起飞前预位了LNAV模式。)
05:38:44,离地后不久,左右记录的AOA值出现偏差。左AOA下降至11.1°然后增加至35.7°,而右AOA值显示14.94°。随后,左AOA值在3/4秒内达到74.5°,而右AOA达到最大值15.3°。此时,左抖杆器被激活(注:表示失速告警)并一直工作直到接近记录结束。此外,左侧的空速、高度和飞行指引仪俯仰指示与右侧对应指示出现偏差。左侧值低于右侧值,直到接近记录结束。
05:38:46,无线电高度大约200英尺,飞机主警告(Master Caution)显示,CVR里记录了副驾驶的喊话“Master Caution Anti-Ice”(主警告-防冰)。4秒钟后,记录的左侧AOA加温的参数改变了状态(e起飞注:即左侧AOA加温故障)。
05:38:58,无线电高度大约400英尺,飞行指引仪俯仰模式改为VNAV SPEED(e起飞注:这意味着飞机在开始起飞前预位了VNAV模式),并且机长喊话“Command”(接通自动驾驶的标准喊话),同时记录到自动驾驶仪警告。(e起飞注:无线电高度400英尺为波音程序规定的起飞后接通自动驾驶的最低高度,一般推荐1000英尺以上再接通自动驾驶。出现自动驾驶警告,意味着机长第一次尝试接通自动驾驶时没有成功,原因可能是未配平好飞机,或者系统本身故障。)
05:39:00,机长喊话“Command”。
05:39:01,无线电高度大约630英尺,记录第二次自动驾驶仪警告(e起飞注:机长第二次尝试接通自动驾驶时没有成功)。
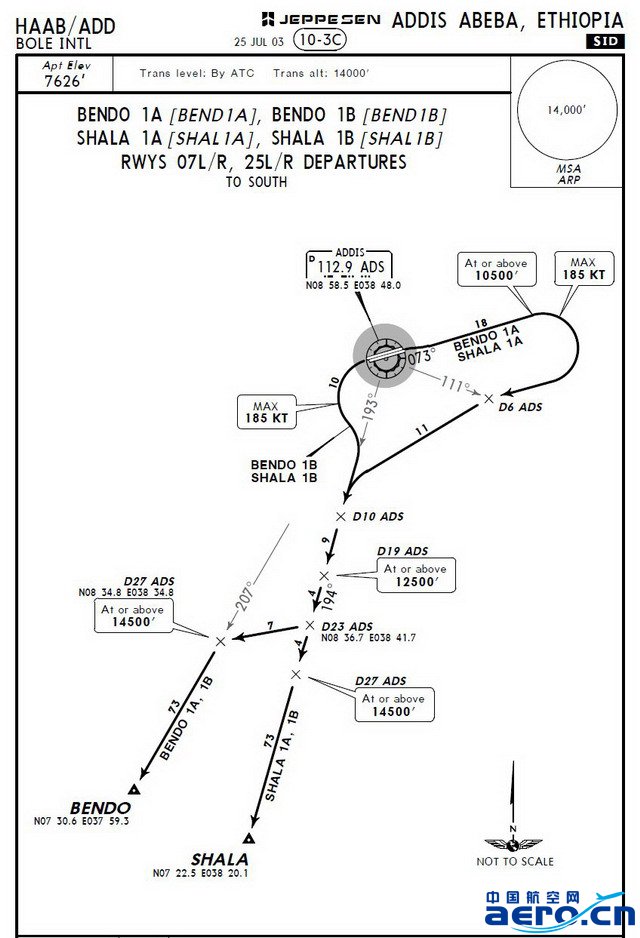
05:39:06,机长指挥副驾驶联系(离场ATC)雷达,副驾驶报告飞机按SHALA 2A离场、通过8400英尺高度并向目标高度FL320(32000英尺)爬升。(e起飞注:SHALA为南向的离场航路点,但目前搜集到的航图资料里仅有SHALA 1A和1B两种离场程序,根据报告后文描述,应为副驾驶口误)
在离地到1000英尺AGL(离地高度)高度之间,安定面位置在4.9至5.9单位之间移动,与手动电动配平输入一致。(e起飞注:即机组在这个过程中使用人工电动配平是有效的)。
中国航空网 www.aero.cn
航空翻译 www.aviation.cn
本文链接地址:专业解读:埃塞航737MAX事故初步调查报告出炉


