
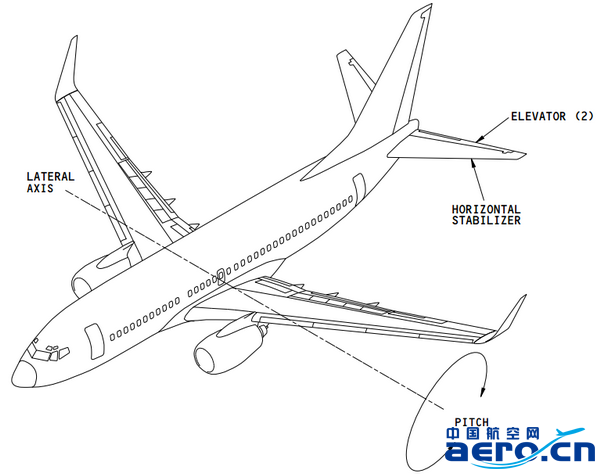
飞机的俯仰运动靠升降舵和水平安定面共同实现。升降舵是飞机实现俯仰运动的主要操纵舵面,当方向舵运动的同时,水平安定面协同运动,以增加飞机的抬头或低头力矩,安定面的这种协同运动即是安定面配平。注:本文的安定面均指水平安定面。
安定面配平
对于737NG飞机而言,安定面配平共有4种方式:速度配平、自动驾驶安定面配平、主电配平、人工配平。
1、速度配平
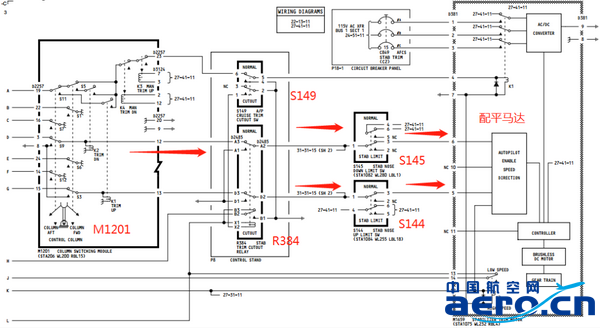
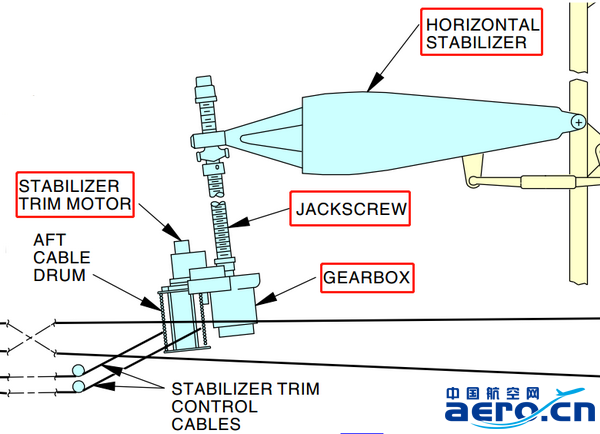
在低速大推力情况下,AP未衔接时,FCC A、B的速度配平信号经过驾驶杆电门组件M1201,再经过自动驾驶安定面配平切断电门S149、安定面向上/向下限制电门S144、S145,到达安定面配平马达。安定面配平马达带动齿轮箱转动,带动丝杠转动,作动安定面。
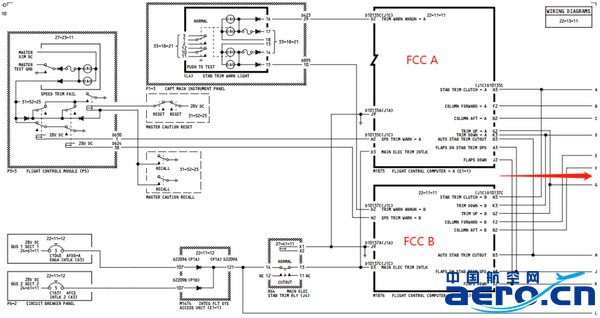
由系统图可以看到,两套速度配平系统,只有FCC A和FCC B是互相独立的,后续的电信号传递的部件均为两套系统共用的,而两套系统共用的部分有故障的话会导致两套速度配平系统均失效,所以MEL 22-10保留的一套速度配平系统只能是保留一个FCC的速度配平功能。
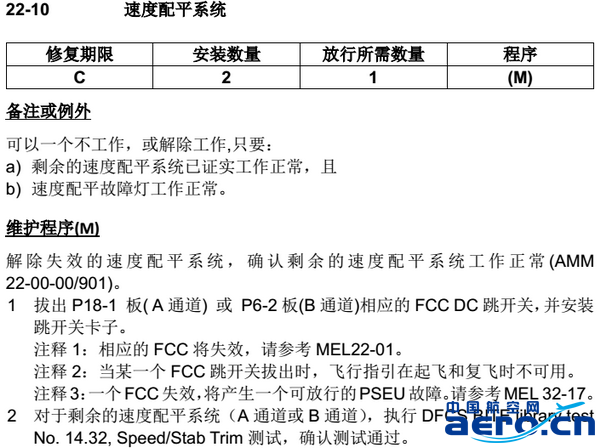
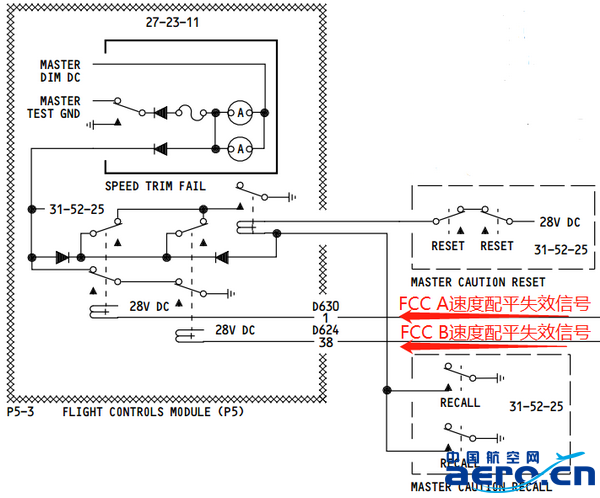
当只有1个FCC的速度配平功能失效时,不会自动点亮速度配平失效灯,按压再现牌会点亮失效灯,按压主警告电门可以复位。当2个FCC均失效时,速度配平失效灯将常亮,无法复位。
2、自动驾驶安定面配平
AP衔接时,FCC A、B的安定面配平信号经过驾驶杆电门组件M1201,再经过自动驾驶安定面配平切断电门S149、安定面向上/向下限制电门S144、S145,到达安定面配平马达。安定面配平马达带动齿轮箱转动,带动丝杠转动,作动安定面。
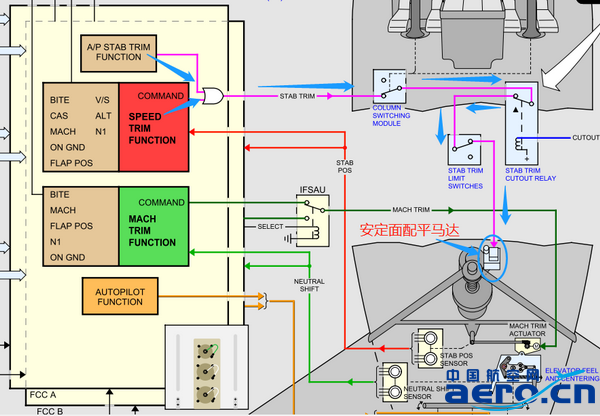
可以看出,自动驾驶安定面配平功能和速度配平功能的指令信号经过的部件均一致,只不过两个功能的触发逻辑不同:速度配平功能是在低速大推力情况下,自动驾驶未衔接时工作;自动驾驶安定面配平功能是在自动驾驶衔接时工作。
没有专门针对自动驾驶安定面配平功能的保留条目,但由于自动驾驶安定面配平是自动驾驶的一部分功能,当自动驾驶安定面配平失效时(需确保电配平工作正常),可以通过MEL 22-01保留一套或两套自动驾驶。
中国航空网 www.aero.cn
航空翻译 www.aviation.cn
本文链接地址:安定面配平的几种方式




